HTXplains:
Swarm robotics – the more bots, the merrier
Robots can already perform pretty impressive tasks on their own. What if they learnt to work with one another?
SCROLL DOWN
Picture this – you’ve had a ball at the biggest New Year countdown party, which just ended. You attempt a beeline for the venue’s exit, only to find yourself in the middle of a moving human swarm.
Everyone in the crowd has the same goal – getting out those doors. They spontaneously adjust and organise themselves in response to the movements around them, incidentally forming systematic “rivers” that stream toward the exit.
Such collective behaviour observed in a group or “swarm” is not unique to us humans. It is also noticeable in the way insects like ants and bees operate as a colony, or how flocks of birds or schools of fish move through their environments.
Everyone in the crowd has the same goal – getting out those doors. They spontaneously adjust and organise themselves in response to the movements around them, incidentally forming systematic “rivers” that stream toward the exit.
Such collective behaviour observed in a group or “swarm” is not unique to us humans. It is also noticeable in the way insects like ants and bees operate as a colony, or how flocks of birds or schools of fish move through their environments.
Better together
Short of a centralised control and command unit, swarm intelligence is often observed as individuals within natural swarms effectively communicating and collaborating with their neighbours, playing their own roles to a tee in order to accomplish a unified goal.
Take a swarm of army ants for example. Be it leaning on their neighbours to construct a bridge with nothing but their bodies, or taking on various construction roles to build a big nest, results often prove more effective than if the ants had worked in silos.

But what makes a swarm, a swarm? While published definitions vary, three key features are often quoted.
Firstly, swarms are decentralised. What this means is that the individuals within exercise autonomy - there is no central entity controlling their decisions or actions, and this enables parallelism, which means that members can undertake different tasks alongside each other while working towards the overall goal of the group.
A swarm is also scalable. It can easily change in numbers, though an increase is generally associated with an uptick in performance. The overall size though, needs to be large enough to allow operational ability to remain unaffected should an individual fail or perish.
Finally, swarms thrive on localised interactions. Individuals engage only with their closest neighbours and do not have access to information across the entire organisation.
Short of a centralised control and command unit, swarm intelligence is often observed as individuals within natural swarms effectively communicating and collaborating with their neighbours, playing their own roles to a tee in order to accomplish a unified goal.
Take a swarm of army ants for example. Be it leaning on their neighbours to construct a bridge with nothing but their bodies, or taking on various construction roles to build a big nest, results often prove more effective than if the ants had worked in silos.
Army ants working together to bridge a gap. (Image: Chris Reid/University of Sydney)
But what makes a swarm, a swarm? While published definitions vary, three key features are often quoted.
Firstly, swarms are decentralised. What this means is that the individuals within exercise autonomy - there is no central entity controlling their decisions or actions, and this enables parallelism, which means that members can undertake different tasks alongside each other while working towards the overall goal of the group.
A swarm is also scalable. It can easily change in numbers, though an increase is generally associated with an uptick in performance. The overall size though, needs to be large enough to allow operational ability to remain unaffected should an individual fail or perish.
Finally, swarms thrive on localised interactions. Individuals engage only with their closest neighbours and do not have access to information across the entire organisation.
Robot swarms
So, could robots be better together too? Scientists and engineers believe so, which is why the field of swarm robotics has been steadily growing over the years.
“Having robots work together as a swarm allows us to achieve goals that may not have been possible with just one robot,” said Ker Chin Tian, an engineer from HTX’s Robotics, Automation & Unmanned Systems (RAUS) Centre of Expertise (CoE).
“Having multiple smaller robots instead of a single powerful unit work on a problem would allow operations to continue even if there is a point of failure. In the case of using just one robot – the operation is over once this robot is destroyed.”

Gerardo Beni, a professor at University of California, Riverside, first explored in 1988 how autonomous robots behave in an n-dimensional cellular space without a central command system to achieve common goals. His study was complemented by that of Toshio Fukuda, then Associate Professor at Science University of Tokyo, who effectively studied how a swarm of robots could work together like cells in a human body to complete complex tasks.
The term “swarm intelligence” was later coined by Beni and his counterpart Jing Wang. Since then, more studies have popped up over the years as researchers attempt to narrow the definition of swarm robotics.
While developments in the field are in their incipient years, they shine a promising light on the potential for applications in industries worldwide. In Germany, the Fraunhofer Institute for Material Flow & Logistics successfully tested the implementation of swarm vehicles in warehouse logistics to support the sorting and transportation of goods.
Elsewhere in the United States, researchers from the Texas A&M University System are working on using a mix of ground and aerial robots to execute smart agricultural tasks with optimal usage of resources and minimal waste.
So, could robots be better together too? Scientists and engineers believe so, which is why the field of swarm robotics has been steadily growing over the years.
“Having robots work together as a swarm allows us to achieve goals that may not have been possible with just one robot,” said Ker Chin Tian, an engineer from HTX’s Robotics, Automation & Unmanned Systems (RAUS) Centre of Expertise (CoE).
“Having multiple smaller robots instead of a single powerful unit work on a problem would allow operations to continue even if there is a point of failure. In the case of using just one robot – the operation is over once this robot is destroyed.”
Imagine robots being able to connect with one other and work autonomously to accomplish more complex tasks together. (Photo: Pexels)
Gerardo Beni, a professor at University of California, Riverside, first explored in 1988 how autonomous robots behave in an n-dimensional cellular space without a central command system to achieve common goals. His study was complemented by that of Toshio Fukuda, then Associate Professor at Science University of Tokyo, who effectively studied how a swarm of robots could work together like cells in a human body to complete complex tasks.
The term “swarm intelligence” was later coined by Beni and his counterpart Jing Wang. Since then, more studies have popped up over the years as researchers attempt to narrow the definition of swarm robotics.
While developments in the field are in their incipient years, they shine a promising light on the potential for applications in industries worldwide. In Germany, the Fraunhofer Institute for Material Flow & Logistics successfully tested the implementation of swarm vehicles in warehouse logistics to support the sorting and transportation of goods.
In the future, there could be swarm robots working independently in warehouse logistics. (Photo: Pexels)
Elsewhere in the United States, researchers from the Texas A&M University System are working on using a mix of ground and aerial robots to execute smart agricultural tasks with optimal usage of resources and minimal waste.
Force multiplying the Home Team
Closer to home, swarm robotics have the potential to enhance the Home Team’s efforts in keeping Singapore safe and secure.
Here at HTX, Chin Tian and her teammates from RAUS CoE are deep into their research on how the use of unmanned aerial vehicle (UAV) swarms, or drone swarms, can aid in the Home Team’s search and rescue operations or in identifying security threats.

Of course, deploying multiple drones to search an area for survivors or suspects is possible without swarm robotics, but this would require several human operators, each of whom would be controlling their own drone.
With swarm robotics, the flying bots would be able to communicate with one another to determine their own areas to cover and ensure there is no overlap in coverage.
Besides reducing the need for manpower, a robot swarm would also allow such an operation to be completed in a much shorter time, something that is crucial to life-saving operations, explained Chin Tian.
“Similarly, when faced with an unknown security threat, we could send in a drone swarm to investigate instead of putting the lives of Home Team officers at risk,” she added.
Closer to home, swarm robotics have the potential to enhance the Home Team’s efforts in keeping Singapore safe and secure.
Here at HTX, Chin Tian and her teammates from RAUS CoE are deep into their research on how the use of unmanned aerial vehicle (UAV) swarms, or drone swarms, can aid in the Home Team’s search and rescue operations or in identifying security threats.
Chin Tian posing with one of the many UAVs she experiments on. (Photo: HTX)
Of course, deploying multiple drones to search an area for survivors or suspects is possible without swarm robotics, but this would require several human operators, each of whom would be controlling their own drone.
With swarm robotics, the flying bots would be able to communicate with one another to determine their own areas to cover and ensure there is no overlap in coverage.
Besides reducing the need for manpower, a robot swarm would also allow such an operation to be completed in a much shorter time, something that is crucial to life-saving operations, explained Chin Tian.
“Similarly, when faced with an unknown security threat, we could send in a drone swarm to investigate instead of putting the lives of Home Team officers at risk,” she added.
Creating the swarm
So, how does one go about creating a swarm of robots? Well, the “magic” lies in the programming.
According to Chin Tian, there are multiple ways of designing algorithms that ensure individual drones can connect with one another during a mission and share essential information that would assist in their own calculations and decision-making.
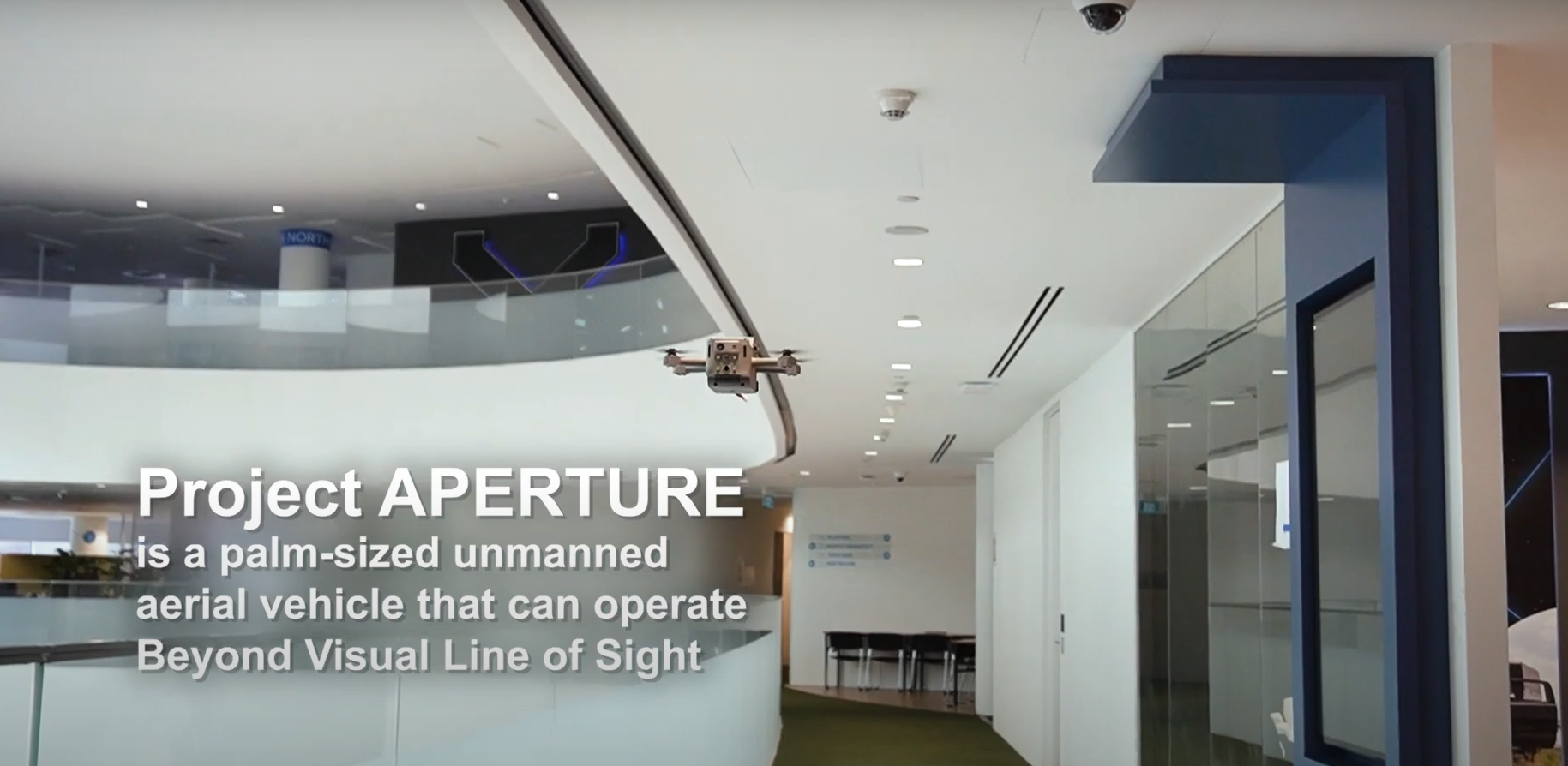
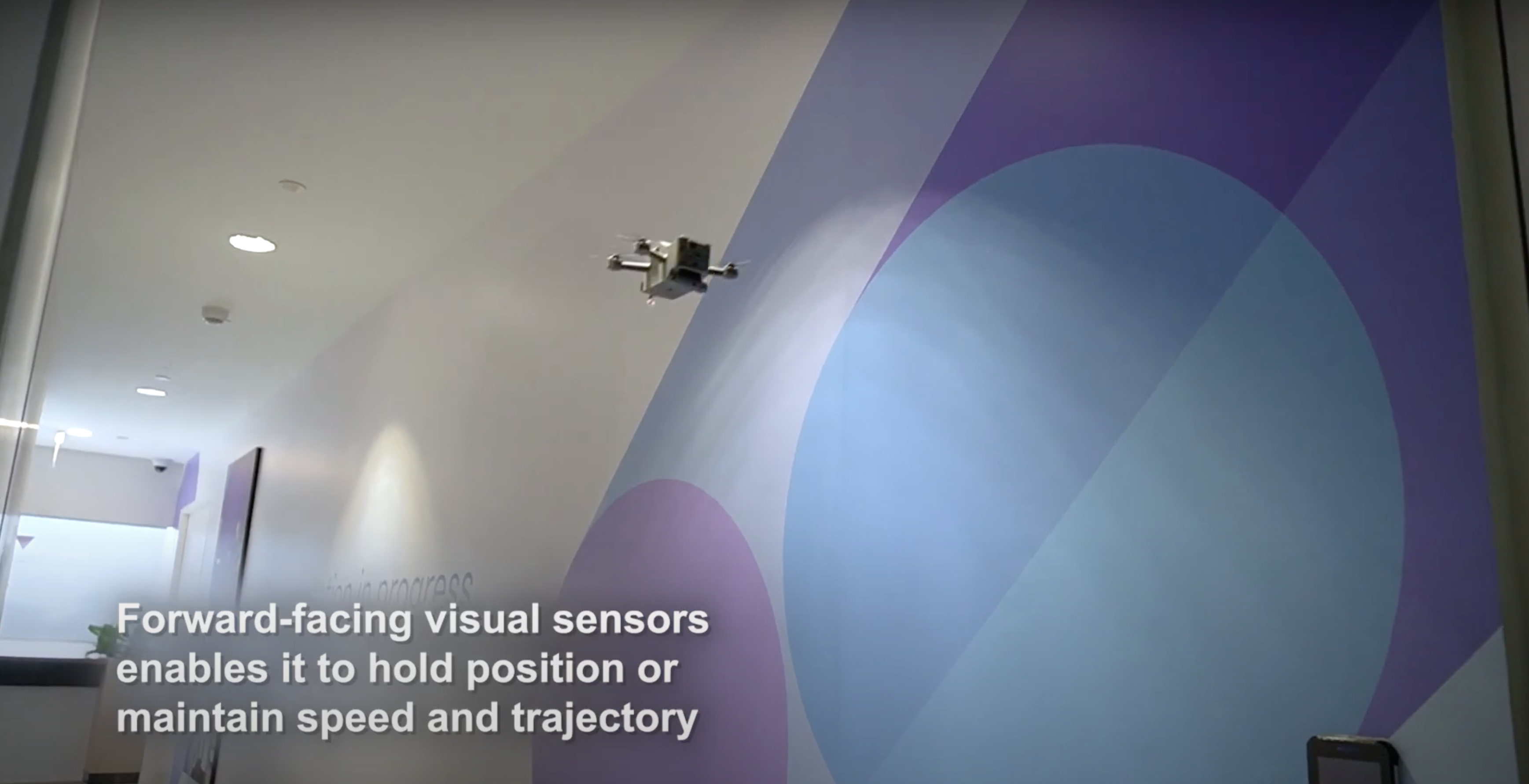
In fact, she is currently working on adapting one such known algorithm for Aperture, HTX’s palm-sized, cellular Beyond Visual Line of Sight (BVLOS) drone. Aperture is unlike conventional drones in that it can operate without Global Navigation Satellite System (GNSS) access and beyond the range of conventional radio, thus making it ideal for exploring spaces indoors.
So, how does one go about creating a swarm of robots? Well, the “magic” lies in the programming.
According to Chin Tian, there are multiple ways of designing algorithms that ensure individual drones can connect with one another during a mission and share essential information that would assist in their own calculations and decision-making.
In fact, she is currently working on adapting one such known algorithm for Aperture, HTX’s palm-sized, cellular Beyond Visual Line of Sight (BVLOS) drone. Aperture is unlike conventional drones in that it can operate without Global Navigation Satellite System (GNSS) access and beyond the range of conventional radio, thus making it ideal for exploring spaces indoors.


Besides running simulations to test the adapted algorithm and assess if environment mapping can be successfully executed by the drone swarms, Chin Tian is also experimenting with different swarm characteristics, such as the number and size of drones, as well as environmental stressors, to determine the efficacy of the swarm under varying circumstances. Algorithms that have been determined to be effective following the simulations would then be translated to Aperture for physical testing.
Sounds simple enough? It hardly is. One key challenge is finding that perfect balance between the drones’ computing power and their physical capabilities.
“Smarter drones mean more computing resources, which translate to larger batteries and in turn, bigger and heavier drones that may not be suitable for operations where smaller drones are needed to travel through narrow areas. Bigger drones also mean higher costs,” she explained.
“Communication between drones is also an area we are working hard to improve. It’s not always perfect in the real world – there are times when there is data loss or the transfer of information between the drones is slower than ideal, and this could lead to inaccurate or untimely decision-making.”
Though drones of today are mainly remote-controlled and not quite as autonomous as imagined – with many still requiring waypoints to be set for their routes – Chin Tian believes that we will see significant progress in drone autonomy within the coming decade.
But as with every technological innovation, threats of malicious use exist. RAUS CoE aims to address the potential security challenges posed by the autonomy and unpredictability of drone or robot swarms through joint studies with three universities – National University of Singapore, Carnegie Mellon University and University of Pennsylvania.
These studies will focus on the development of dual-use swarm artificial intelligence (AI) that can be applied in both swarm and counter-swarm cases.
“While challenges remain in terms of implementation, the potential benefits of this technology in safeguarding Singapore's security and well-being are undeniable,” Chin Tian remarked.
“As research and development in this field progress, we can expect to see increasingly sophisticated and effective swarm robotic systems supporting the vital work of the Home Team in the years to come!”
──────────────────
Read more News & Events
Sounds simple enough? It hardly is. One key challenge is finding that perfect balance between the drones’ computing power and their physical capabilities.
“Smarter drones mean more computing resources, which translate to larger batteries and in turn, bigger and heavier drones that may not be suitable for operations where smaller drones are needed to travel through narrow areas. Bigger drones also mean higher costs,” she explained.
“Communication between drones is also an area we are working hard to improve. It’s not always perfect in the real world – there are times when there is data loss or the transfer of information between the drones is slower than ideal, and this could lead to inaccurate or untimely decision-making.”
Though drones of today are mainly remote-controlled and not quite as autonomous as imagined – with many still requiring waypoints to be set for their routes – Chin Tian believes that we will see significant progress in drone autonomy within the coming decade.
But as with every technological innovation, threats of malicious use exist. RAUS CoE aims to address the potential security challenges posed by the autonomy and unpredictability of drone or robot swarms through joint studies with three universities – National University of Singapore, Carnegie Mellon University and University of Pennsylvania.
These studies will focus on the development of dual-use swarm artificial intelligence (AI) that can be applied in both swarm and counter-swarm cases.
“While challenges remain in terms of implementation, the potential benefits of this technology in safeguarding Singapore's security and well-being are undeniable,” Chin Tian remarked.
“As research and development in this field progress, we can expect to see increasingly sophisticated and effective swarm robotic systems supporting the vital work of the Home Team in the years to come!”