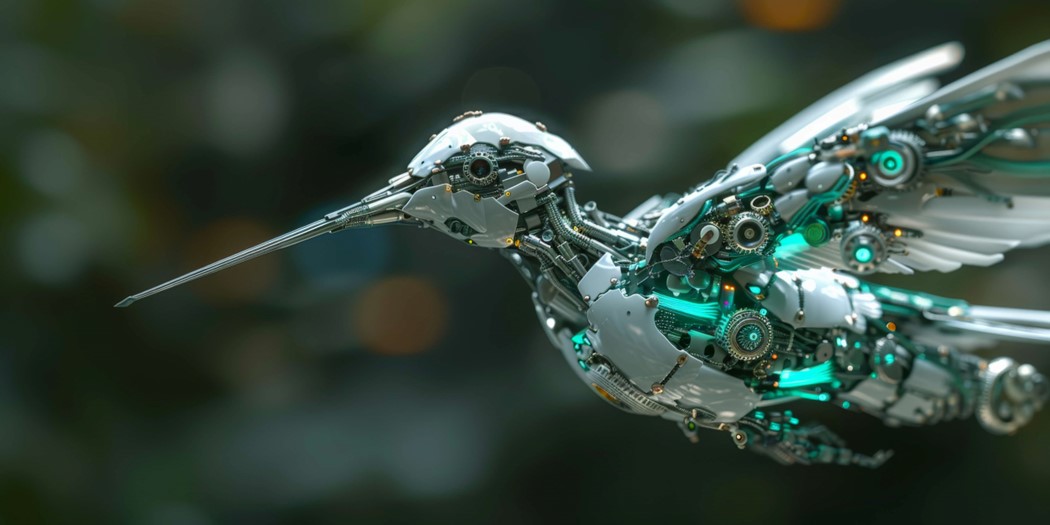
 A rendering of what a bird-inspired robot might look like. (Photo: Freepik)
A rendering of what a bird-inspired robot might look like. (Photo: Freepik)
For millennia, humans have forged deep and complex relationships with animals, utilising them to serve various purposes. Early civilisations domesticated dogs for hunting and protection, and cattle for farming and food.
Today, man is
channelling the abilities of living organisms through bio-inspired robotics. Think of robots that can soar like birds, crawl like insects, or swim like fish.
Why do we need such robots?
Because being modelled after the abilities
and movements of animals allows them to tackle challenges that traditional machines cannot.
HTX is at the forefront of this technology, with its Robotics, Automation and Unmanned Systems Centre of Expertise (RAUS CoE) exploring various
bio-inspired robot forms and applications to boost homeland security and safety. Here, engineer Joseph Wong and his teammates are developing a surveillance drone that could fly like a bird – this drone is rigged with a pair of wings that flap
up and down to generate lift (to stay in the air) and thrust (to move forward).
“Like their natural counterparts, bio-inspired robotic birds have the potential to emit a very low-decibel and low-pitch noise, and hence are useful for
covert surveillance operations,” explained Joseph.
“They are also exceptionally manoeuvrable and can execute complex aerial manoeuvers such as rapid directional changes, hovering, darting, and pulling up from dives,”
he added.
Bio-inspired robots in dynamic, dangerous environments
Bio-inspired robots wield several advantages over traditional robots, particularly in their ability to adapt to complex, dynamic environments.
For example, SPYDER, conceptualised by HTX’s RAUS
CoE and the Police Coast Guard (PCG), and developed by ST Engineering, is a hull climbing robot that uses magnetic tracks to efficiently traverse the ship's hull.
Drawing inspiration from nature, SPYDER's design mimics the movement of creatures adept at climbing vertical surfaces. This innovative robot enhances the Home Team's ship-boarding operations by deploying a ladder once in position and using a robotic
arm to secure a titanium hook to the hull, ensuring a stable and secure boarding process.
 Researchers at Carnegie Mellon University have programmed snake robots to weave their way through rubble and around obstacles using vertical and horizontal body waves, enabled by perpendicular joints. (Photo: Carnegie Mellon University)
Researchers at Carnegie Mellon University have programmed snake robots to weave their way through rubble and around obstacles using vertical and horizontal body waves, enabled by perpendicular joints. (Photo: Carnegie Mellon University)
Humanoid robots, another bio-inspired innovation, are emerging as a prominent area of interest. Unlike traditional robots that are typically designed for single-purpose tasks, these bio-inspired robots are increasingly capable of performing multiple functions.
Joseph explained that, unlike industrial robots with task-specific end-effectors (the device attached to the end of a robotic arm), an anthropomorphic humanoid hand replicating the joint movements of the human hand achieves greater dexterity, allowing it to perform a diverse range of tasks. When integrated with an advanced tactile sensor array, such robots can provide operators with realistic haptic feedback – using vibrations or pressure stimuli to simulate the sensation of touch.
This feedback system is naturally more intuitive, as the force sensations from each robotic finger can be directly mapped onto the operator's hand. Besides allowing the robot to handle delicate objects, tactile feedback allows robots to detect unexpected forces, such as collisions, and respond quickly to fulfil the required task.
In the context of homeland security, humanoid robots can perform key functions such as handling suspicious objects, interacting with dangerous materials, and conducting searches.
“These tasks are simple for a human but involve a sequence of actions that are complex for a robot due to the precision and dexterity required,” said Joseph.
“For example, when handling suspicious objects, humanoid robots can unzip unattended bags and manipulate objects of irregular shapes,” he said. “In a hazmat sampling operation, such robots can unscrew and tighten the cap on test tube samples, and even extend their limbs or rotate their torsos to retrieve items from difficult-to-reach areas,” he added.
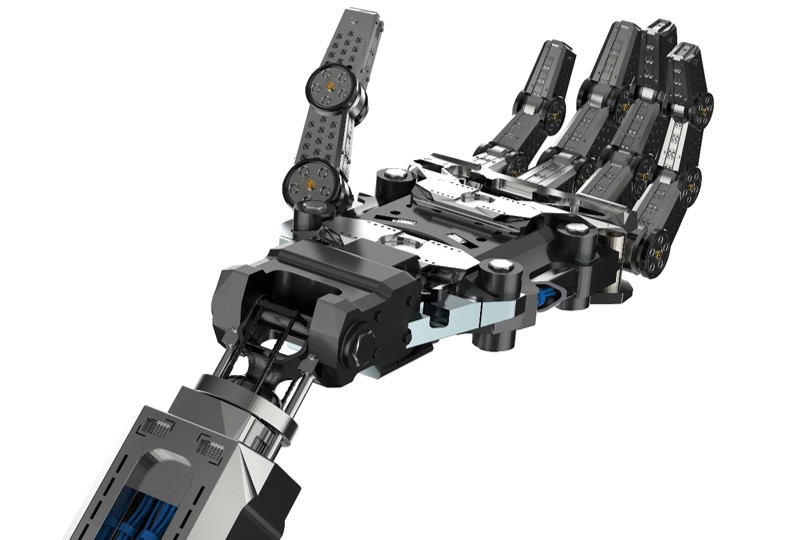 Robotic hands equipped with tactile sensor arrays can provide operators with haptic feedback and simulate the sensation of touch, making them useful for tasks like unzipping unattended bags. (Photo: Freepik)
Robotic hands equipped with tactile sensor arrays can provide operators with haptic feedback and simulate the sensation of touch, making them useful for tasks like unzipping unattended bags. (Photo: Freepik)
By taking on these dangerous and intricate tasks, humanoid robots not only remove Home Team officers from these operational risks or hazardous environment but also allow frontline officers to focus on higher-level decision-making and critical actions
at the scene.
One such bio-inspired robot that may soon join forces with Home Team officers on the frontline is Rover-X, a four-legged robotic dog (quadruped robot) that is equipped with sensors and can move autonomously over different
terrain. It was jointly developed by HTX in collaboration with Klass Engineering and Solutions, Ghost Robotics and A*STAR’s Institute for Infocomm Research (I2R).
“A legged robot is able to climb stairs and move
over curbs, gaps and other obstacles, which makes it useful for outdoor operations such as search and rescue, where it can navigate a rubble-filled disaster site or post-blast scene,” said Joseph.
He further revealed that his
team is also working on mounting a robotic arm onto a quadruped robot to conduct hazmat sampling tasks such as pouring liquids into test tubes and obtaining air samples from a suspected chemical source.
“To carry out such hazardous
tasks, hazmat operators typically don Personal Protective Equipment (PPE) suits that limit their vision and dexterity, so this can help them perform tasks while on missions,” explained Joseph.
In the same vein, Rover-X is being trialled
for chemical leak inspections. However, it can also potentially be dispatched to scan the environment for threats such as unattended baggage and people in unauthorised areas through the use of video analytics.
A work in progress
While there are numerous applications for bio-inspired robots in homeland security, developing such technologies comes with myriad obstacles. Joseph shared that while flapping wing drones can generate lift efficiently at low speeds, they tend
to be less efficient than fixed wings or rotor-based drones in terms of lifting heavier loads. He explained that the complex, dynamic motion of the wings required for flapping flight demands significant energy, which limits the capacity to carry heavy
equipment like sensors and cameras.
In addition, mimicking the precise motion of a bird’s wings presents significant challenges.
“To generate lift, birds adjust the acceleration and angle of attack of their wings
at different phases of the flapping cycle. The airflow and forces acting on the animal are governed by unsteady aerodynamics, unlike the steady-state aerodynamics of fixed-wing or quadcopter drones, where the air flow around the drone’s body
can be assumed to be time-independent,” he said.
This complexity makes designing and optimising a flapping wing system particularly difficult. To navigate this, he relied on empirical formulas from successful flapping wing drones
and the scaling laws of natural fliers to design and optimise their machine’s dimensions.
Perhaps more exciting for the Home Team is the potential to incorporate bio-inspired robots into swarm robotics,
an emerging field that RAUS CoE is actively exploring.
 Not exactly a robot, but HTX’s cyborg cockroach has already been deployed to disaster zones to help with search and rescue efforts. (Photo: SCDF)
Not exactly a robot, but HTX’s cyborg cockroach has already been deployed to disaster zones to help with search and rescue efforts. (Photo: SCDF)
Here is one potential future scenario he painted – a flock of flapping wing drones equipped with cameras and thermal sensors surveying disaster zones, mapping obstacles and identifying hotspots for further exploration. At the same time, ground-based platforms like quadruped robots can navigate rubble and rough terrain to locate survivors, while bio-inspired snake robots are used to access tight spaces.
While it isn’t exactly a robot, the cyborg cockroach developed by HTX, Klass Engineering Solutions and the National University of Singapore has already proved that little creatures can be helpful in disaster zones.
Case in point? The cyborg roach was deployed to help with search and rescue efforts in Myanmar after the country was hit by an earthquake in March.
